Off-board Control (1) Pixhawk
1. Off-board Control
http://www.modulabs.co.kr/board_GDCH80/2961
위 글에서 언급했듯이 저희가 하려는 것은 mavros를 통해서 PX4와 ROS를 연결하고, 그로 인해 offboard control을 하는 것입니다.
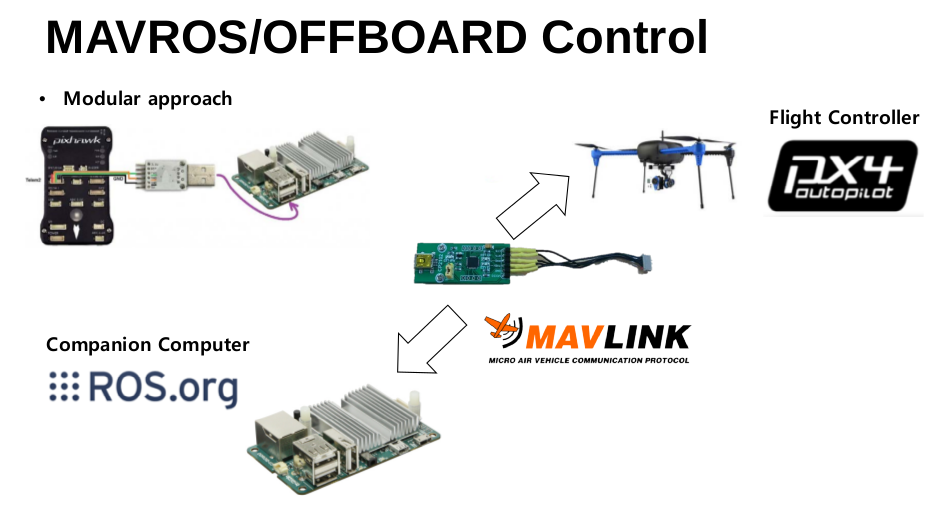
위 그림 중에서 modular approach를 하려고 합니다. 라즈베리파이에 이전에 ROS설치했던 것처럼 동일하게 설치하고 그 라즈베리파이와 PX4 flgiht stack이 설치된 pixhawk를 연결해서 자율주행을 할 계획입니다. 라즈베리파이와 연결해서 사용하기 전에 pixhawk보드에 먼저 PX4를 설치를 하고 Pixhawk로만 비행을 해 보도록 하겠습니다.
2. Pixhawk 보드 설치

첫 번째 글에서 Pixhawk에 대해서 설명한 적이 있습니다. Pixhawk가 무엇인지 모르시는 분들은 Pixhawk 홈페이지를 참조해주시길 바랍니다.
https://pixhawk.org/
이 프로젝트를 하기 전에 아두이노 우노와 나노로 450mm frame 쿼드콥터를 만드는 프로젝트를 했었습니다. 그 때 사용했던 쿼드콥터에서 아두이노만 빼서 그대로 Pixhawk를 달고 사용하려고 합니다. Pixhawk는 준비되어 있다고 생각하겠습니다. (주문하고 배송오는 데만 시간이 많이 걸릴 겁니다.)
아두이노 드론을 만들 때 구매했던 부품 리스트는 다음과 같습니다.
- Frame
- BLDC motor
- Propeller
- ESC
- Battery
- Battery Charger
- Power distribution board
- Mirco controller(Arduino)
- Gyro sensor(+Accelerometer)
- Transmitter(+receiver)
위 리스트에서 8번과 9번을 빼고 Pixhawk를 넣으면 되겠습니다. Pixhawk는 보통 세트로 오기 때문에 그 안에 텔레메트리도 있고 GPS도 있고 여러가지가 추가로 들어있습니다. 구매했던 링크는 다음과 같습니다.
해외(하비킹) http://www.hobbyking.com/hobbyking/store/index.asp
- Frame : Hobbyking SK450 Glass Fiber Quadcopter Frame 450mm 1개
- Motor : Turnigy Aerodrive SK3 - 2826-1240kv Brushless Outrunner Motor 4개
- ESC : Afro ESC 30Amp Multi-rotor Motor Speed Controller (SimonK Firmware) 4개
- Propeller : Hobbyking™ Propeller 10x4.5 White (CW) (4pcs) 1개
Hobbyking™ Propeller 10x4.5 White (CCW) (4pcs) 1개 - Power distribution board : Hobby King Octocopter Power Distribution Board 1개
- Battery : Turnigy nano-tech 2200mah 3S 35~70C Lipo Pack 2개
- Battery Charger : IMAX B6AC V2 Professional Balance Charger/Discharger
프로펠러나 배터리같은 건 여분을 구매하시는 것이 좋고 모터랑 ESC와 배터리 프로펠러는 서로 맞는 것을 구매해야 해서 임의로 구입하지 말고 이미 검증된 조합을 구매하시는 것이 좋습니다. 위의 조합도 하비킹 직원에게 문의해서 나온 조합입니다.
조립하면 밑과 같이 되는데 조립하는 과정에 대해서는 간단하게 정리해놨던 글이 있습니다.
http://www.whydsp.org/343
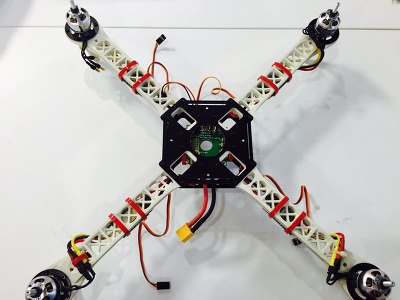
여기에 Pixhawk를 설치해주시면 됩니다.
부품리스트는 다음과 같습니다.
Package Included:
- PX4 V2.4.7 Flight board x1
- safety switch x1
- Buzzer x1
- Original Case x1
- 4GB SD Card x1
- SD Card Adapter x1
- External LED light board X 1
- PPM Module w/ shell x1
- Pixhawk-I2C Splitter Expand Module X 1
- Neo-M8N Gps Module x1
- Black Gps Holder x1
- Power Module x1
- Minim OSD w/ shell x1
- 433 telemetry w/ shell x1
- DF13 4Pin Cable x1
- DF13 5Pin Cable x1
- DF13 6Pin Cable x1
픽스호크 보드 자체의 세부 사항은 다음과 같습니다.
Processor
- 32bit STM32F427 Cortex M4 core with FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash
- 32 bit STM32F103 failsafe co-processor
Sensors
- ST Micro L3GD20H 16 bit gyroscope
- ST Micro LSM303D 14 bit accelerometer / magnetometer
- MEAS MS5611 barometer
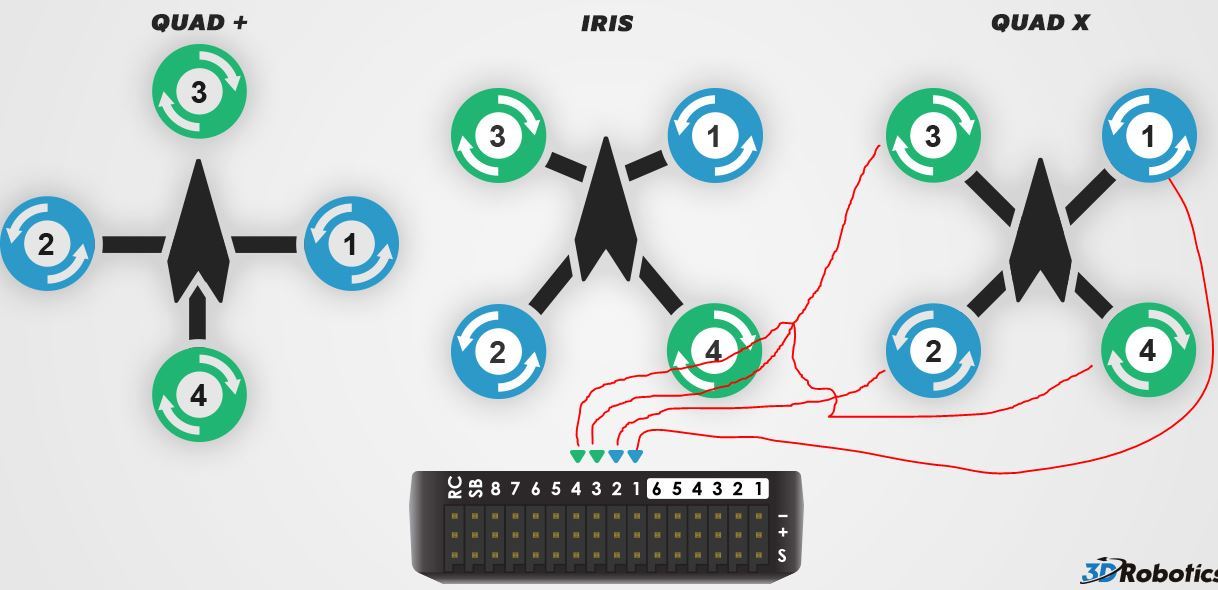
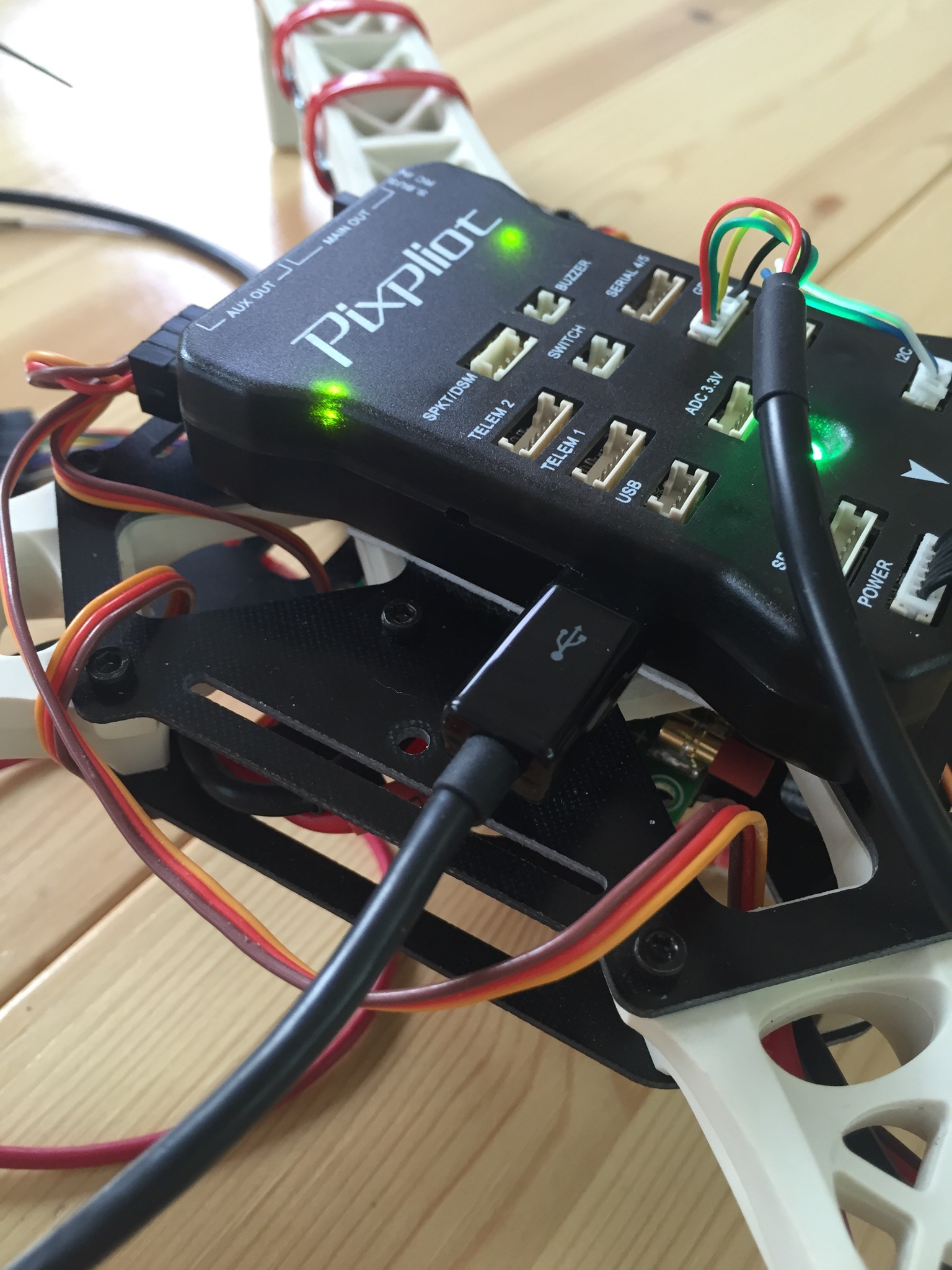
위 부품 리스트 중에서 픽스호크 보드에 GPS, buzzer, switch, power module, ppm module을 연결해주고 각 각 리시버, esc를 연결한 후에 쿼드콥터 프레임 위에 올려줍니다. 아래 왼쪽 그림에서 맨 왼쪽에 RC 부분에 PPM encoder를 연결해주시면 됩니다. 밑의 오른쪽 그림이 픽스호크에 PPM encoder와 ESC선들을 연결한 사진입니다. 세 줄이 있는데 제일 위 줄은 ground이고 두 번째 줄은 +이고 세 번째는 signal선입니다. 그거에 맞춰서 RC라고 써져있는 곳에 PPM encoder를 연결하고 Mainout 1,2,3,4에 ESC를 연결해주면 됩니다.
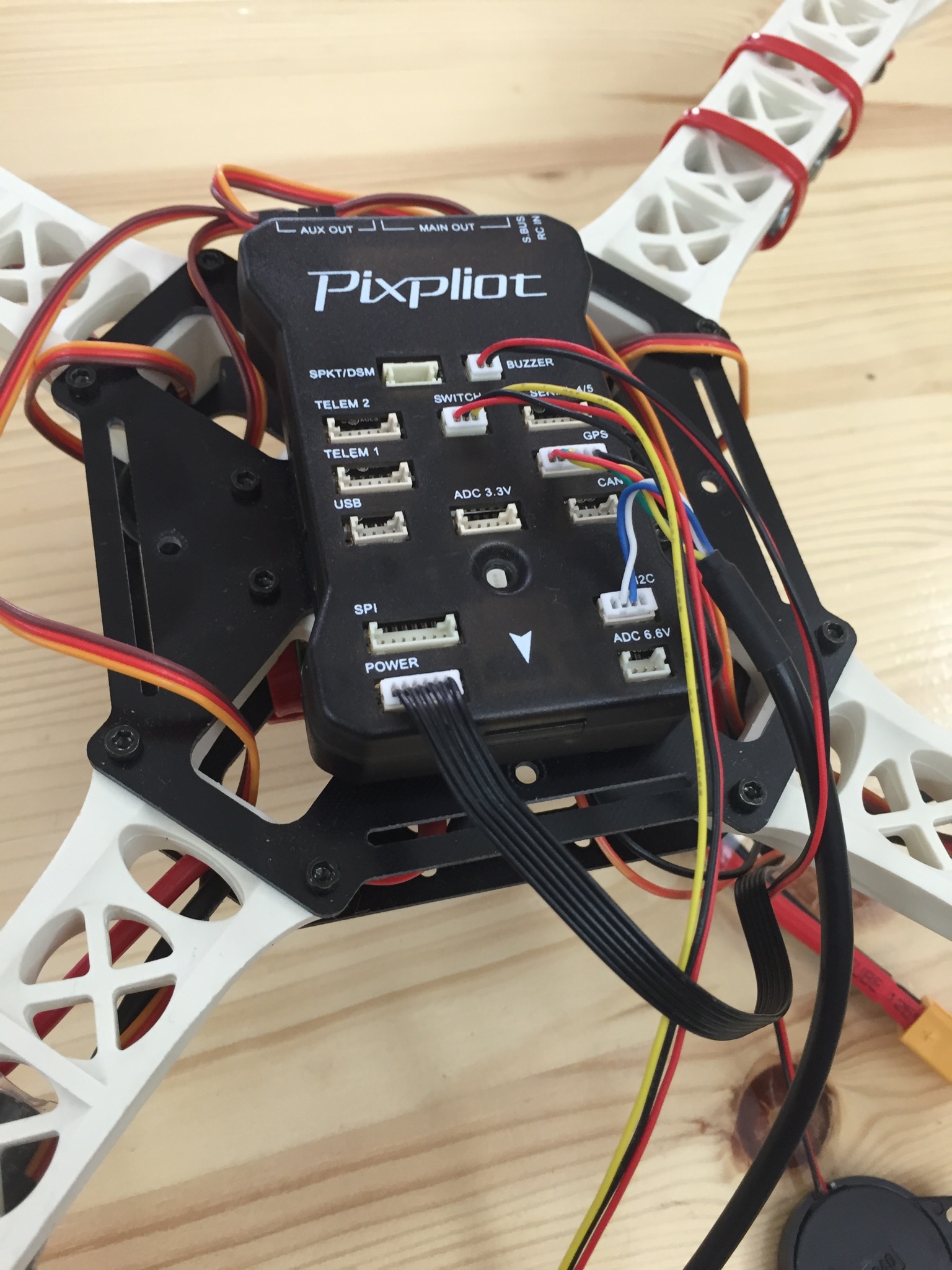
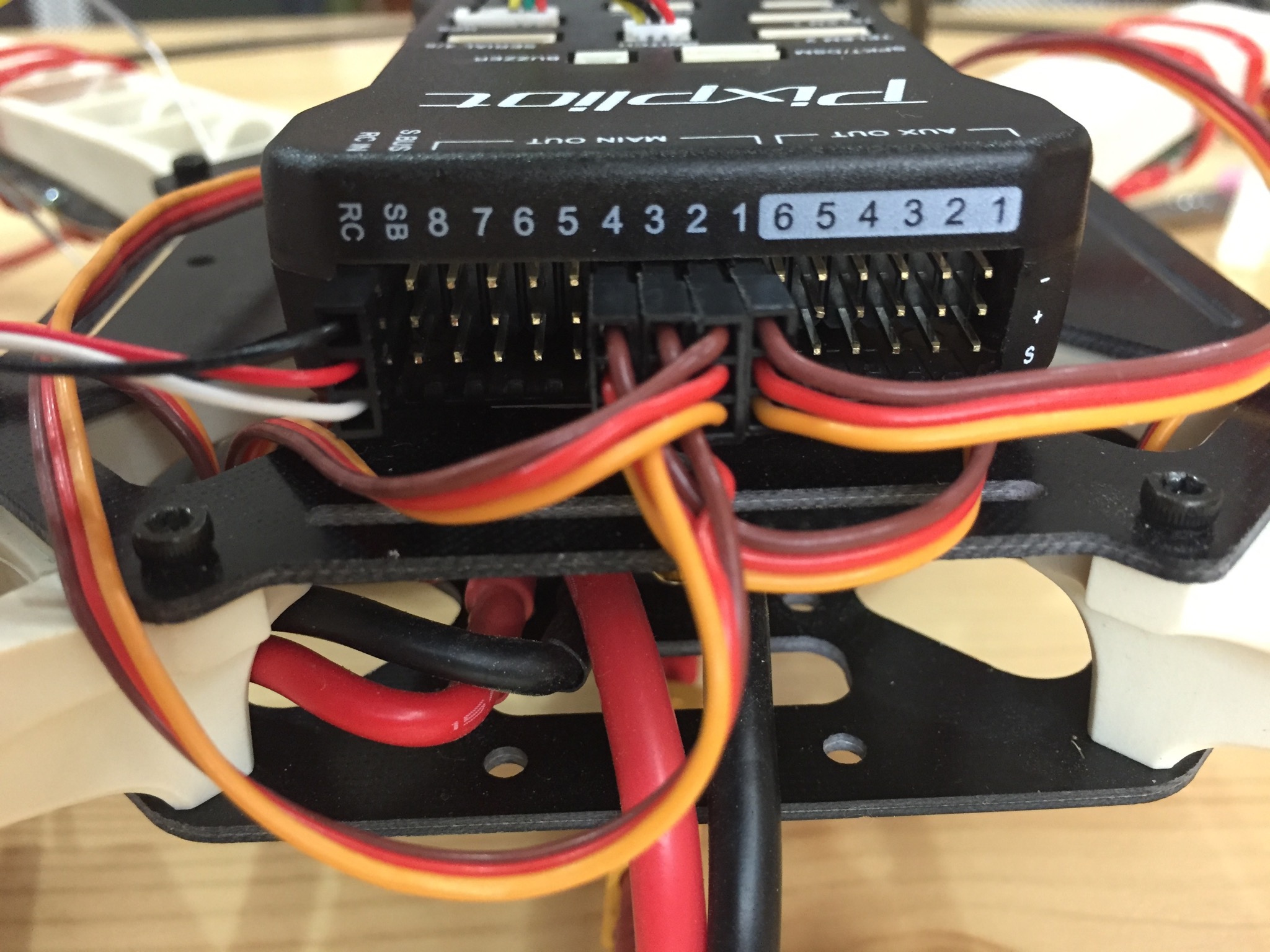
ESC를 연결하실 때 어떤 모터가 1번인지 어떤 모터가 4번인지 알아야합니다. 3D robotics의 사진을 참고해주시면 됩니다. 다른 쿼드콥터와는 달라서 헷갈리기 때문에 정확히 보시고 연결해주세요
http://www.dronetrest.com/t/pixhawk-flips-over/718
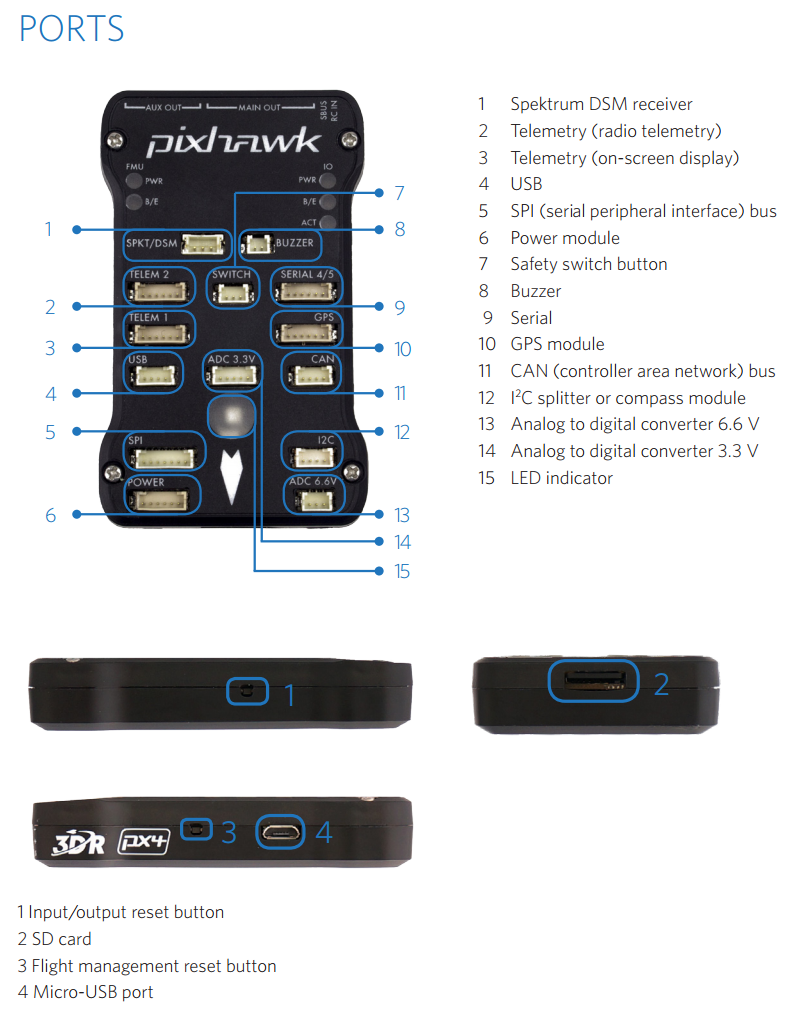
밑의 그림은 Pixhawk 보드의 포트 정보입니다. 참고하시면 되겠습니다.
3. Qgroundcontrol 설치
이렇게 설치가 완료되면 USB선으로 밑의 사진과 같이 컴퓨터와 픽스호크를 연결해줍니다.
이렇게 하드웨어를 준비해준 다음에 이제 소프트웨어를 준비해줍니다. 픽스호크에 올라가는 펌웨어가 PX4 flight stack이라고 말했었는데 그 PX4를 업로드하기도 하고 여러가지 쿼드콥터의 설정들(센서 칼리브레이션, 조종기 칼리브레이션, 채널 설정 등)을 할 수 있는 Qgroundcontrol을 설치하셔야 합니다. Qgroundcontrol의 홈페이지는 다음과 같습니다.
http://qgroundcontrol.org/
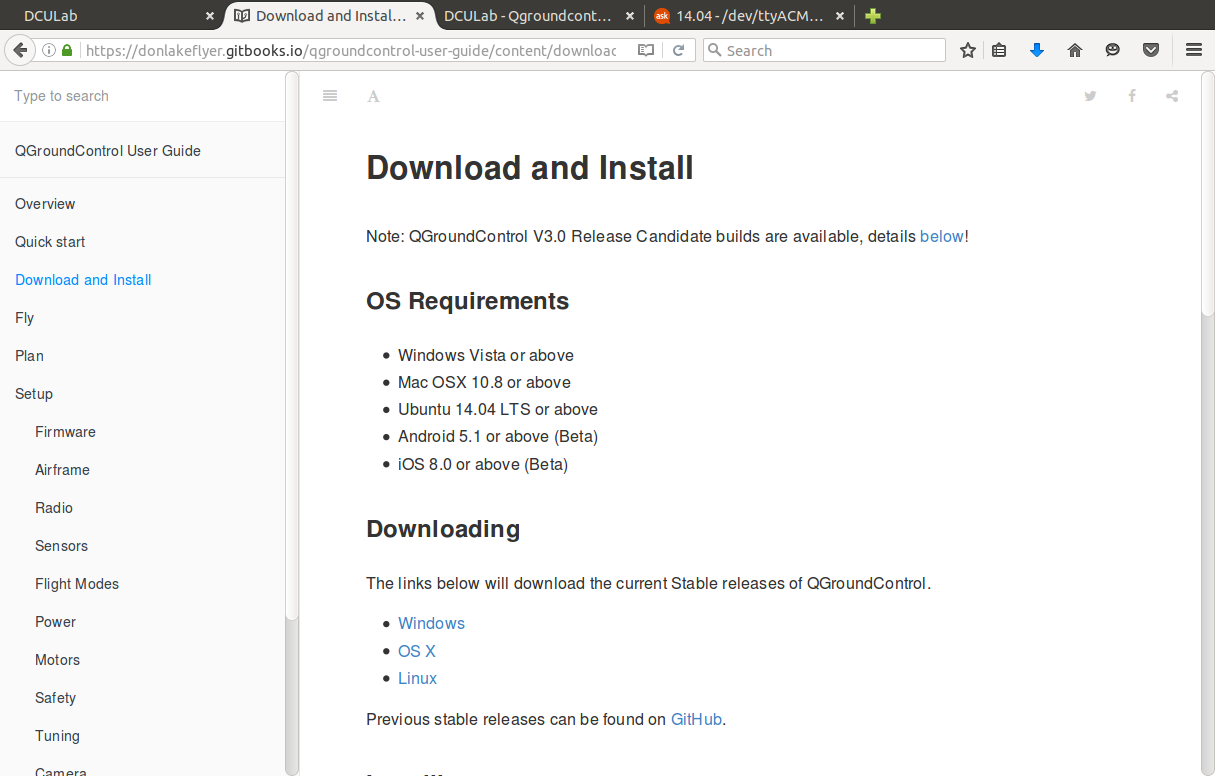
다음 페이지에서 linux버전을 클릭하면 다운로드가 되는데 압축파일이 다운로드가 됩니다. 다운로드가 완료가 되면 위치를 하나 정해서 압축을 풀어주시고 그 폴더안의 start.sh파일을 실행해 주시면 됩니다.
https://donlakeflyer.gitbooks.io/qgroundcontrol-user-guide/content/download_and_install.html#rcbuilds
우분투에서는 여기에 additional package를 설치해줘야합니다. 관련페이지는 다음과 같고 명령어는 밑과 같습니다. https://github.com/mavlink/qgroundcontrol
sudo apt-get install espeak libespeak-dev libudev-dev libsdl1.2-dev
실행할 때에는 qgroundcontrol 폴더 내에서 다음과 같은 명령어를 실행해줍니다.
cd ~/qgroundcontrol
bash qgroundcontrol-start.sh
만약 여기서 에러가 생기면 다음 페이지들을 참조해주세요
해결 방법 1. http://askubuntu.com/questions/616517/dev-ttyacm0-permission-denied-error
해결 방법 2. http://websistent.com/fix-serial-port-permission-denied-errors-linux/ 해결 방법 2 이후에는 reboot 를 해주어야 함.
정상적으로 실행이 되면 다음과 같은 화면이 나옵니다. 이제 Qgroundcontrol를 통해서 pixhawk 설정을 해보도록 하겠습니다.
4. Configrations and Calibration
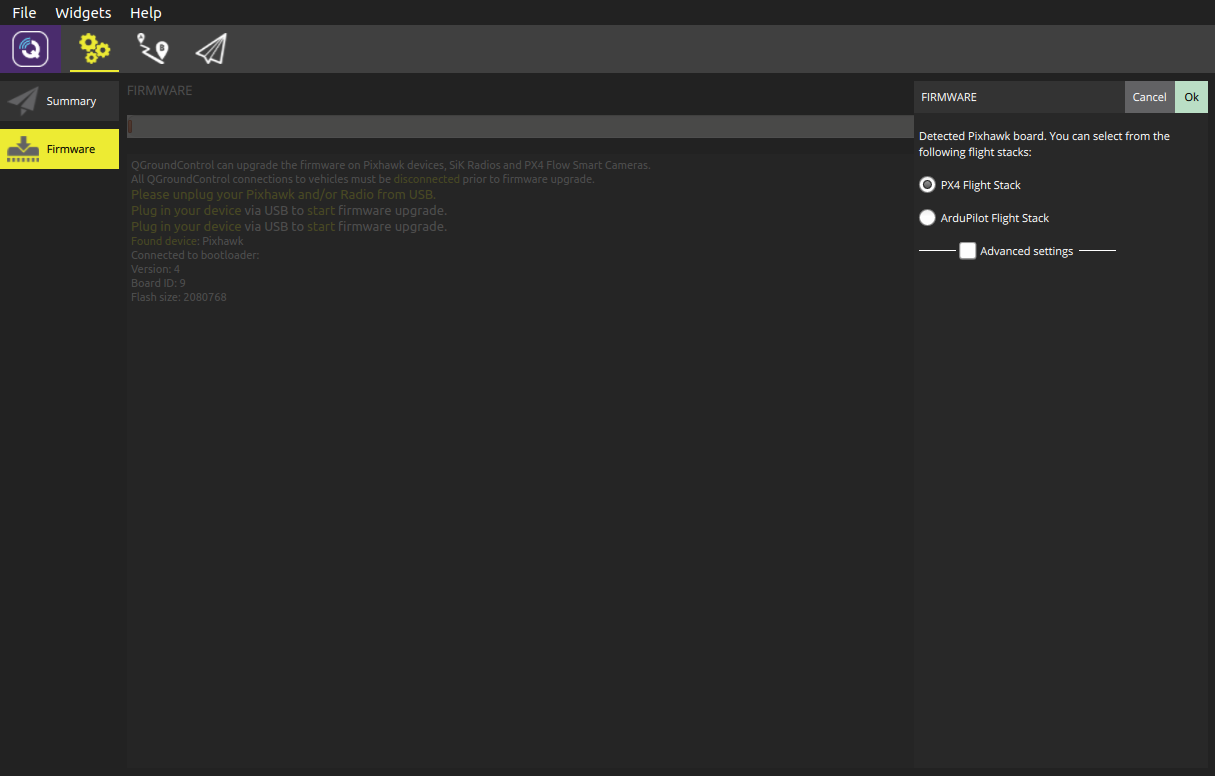
(1) PX4 flight stack 설치
설정을 들어가서 Firmware부분으로 들어가면 다음과 같은 화면이 나옵니다. 글을 읽어보면 USB선을 뺐다 다시 꽂으라고 되어있습니다. 그대로 해주면 오른쪽에 Firmware를 선택할 수 있습니다. 저희는 PX4 Flight Stack를 선택하고 OK를 눌러줍니다.
{kind=link}
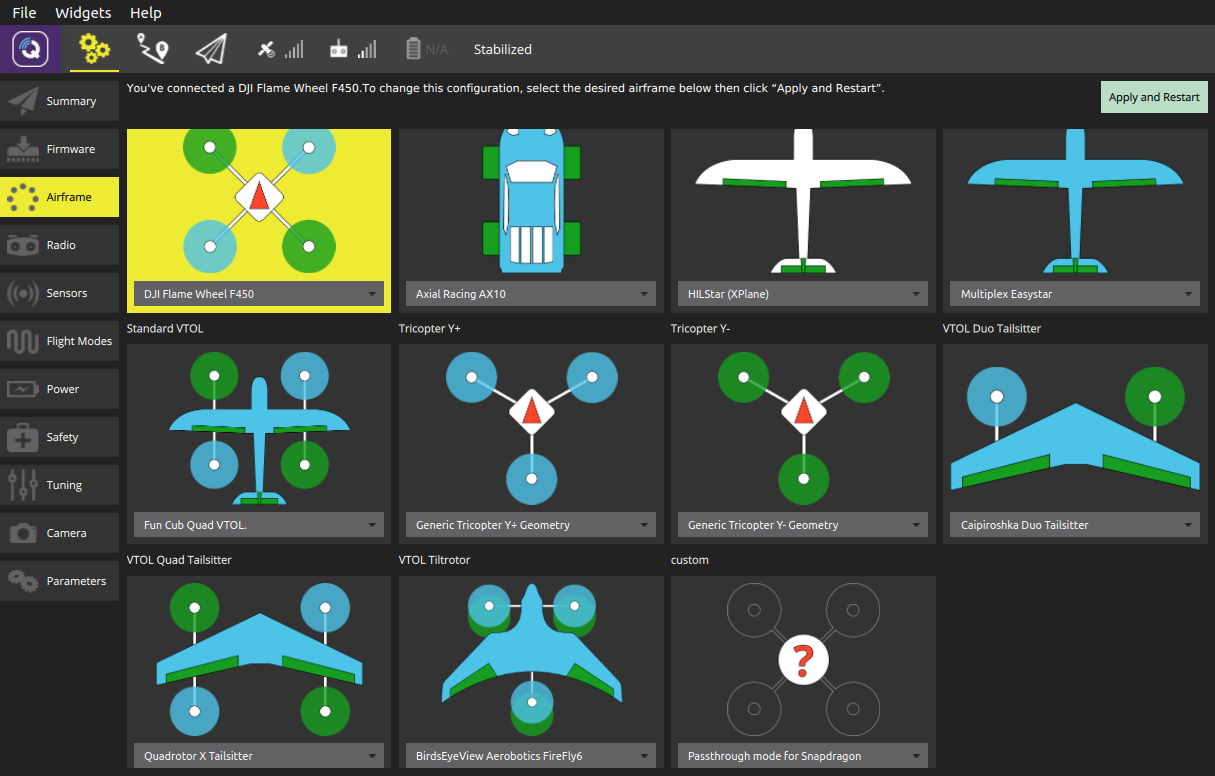
(2) 프레임 선택
제가 사용하고 있는 프레임은 quadcopter X이고 그 중에서 450mm 프레임을 선택하면 얼추 맞기 때문에 DJI Flame Wheel F450을 선택해주었습니다.
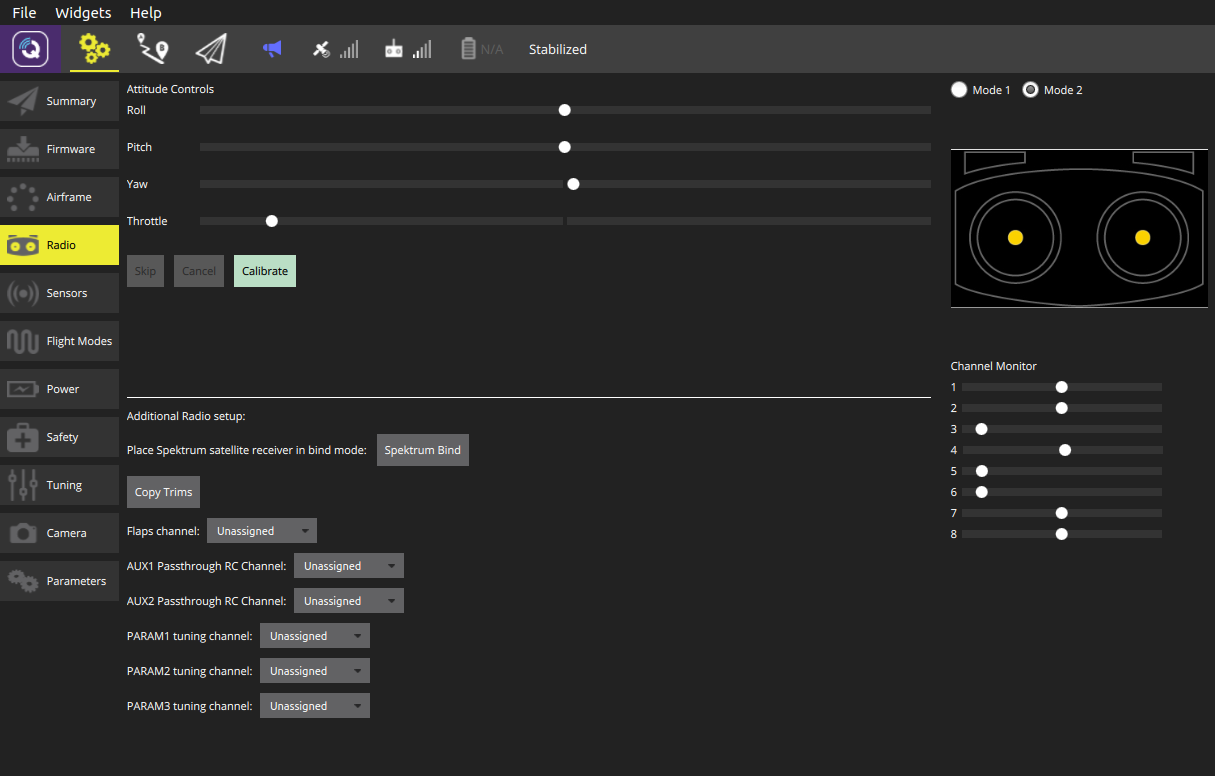
(3) Radio설정
현재 리시버와 트랜스미터를 연결한 상황에서 트랜스미터(조종기)를 캘리브레이션해주는 단계입니다. 친절하게 설명이 계속 나오므로 그 설명대로 해주시면 됩니다.
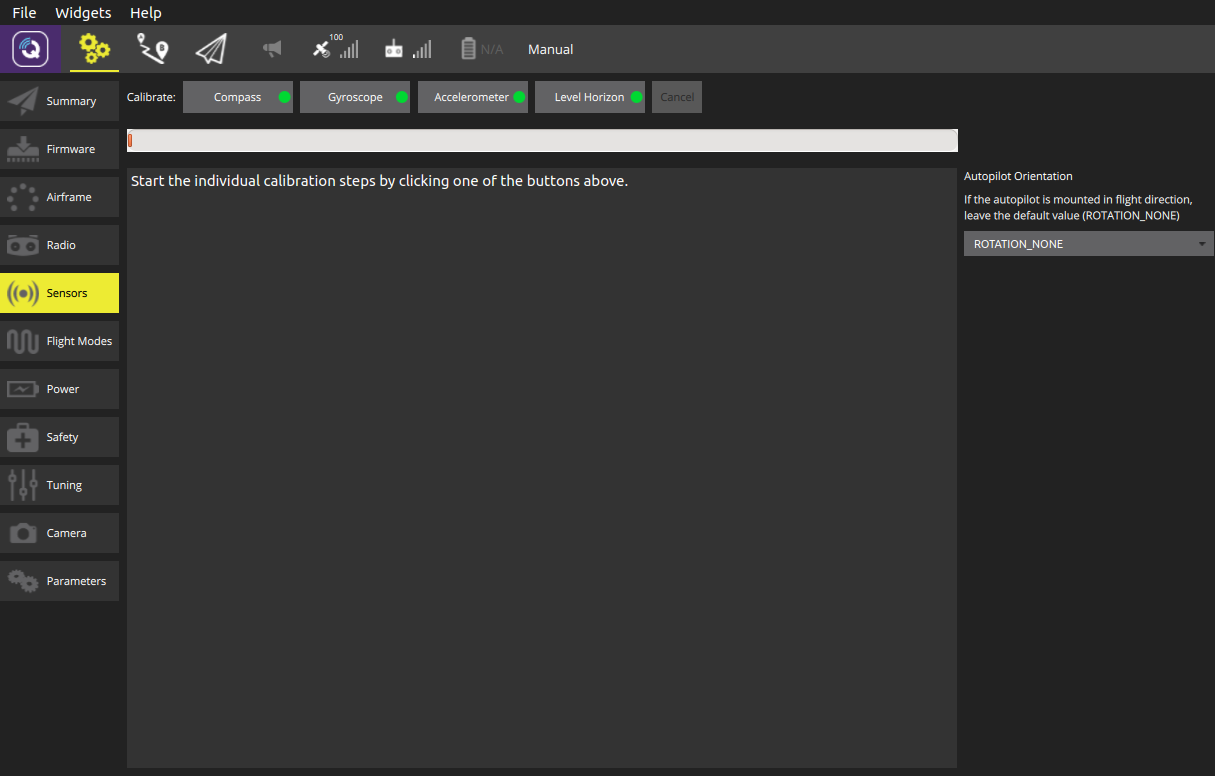
(4) 센서 캘리브레이션
Compass, Gyroscope, Accelerometer, Level Horizon 네 개를 calibrate 해줘야하고 하나씩 클릭해서 진행하시면 됩니다.
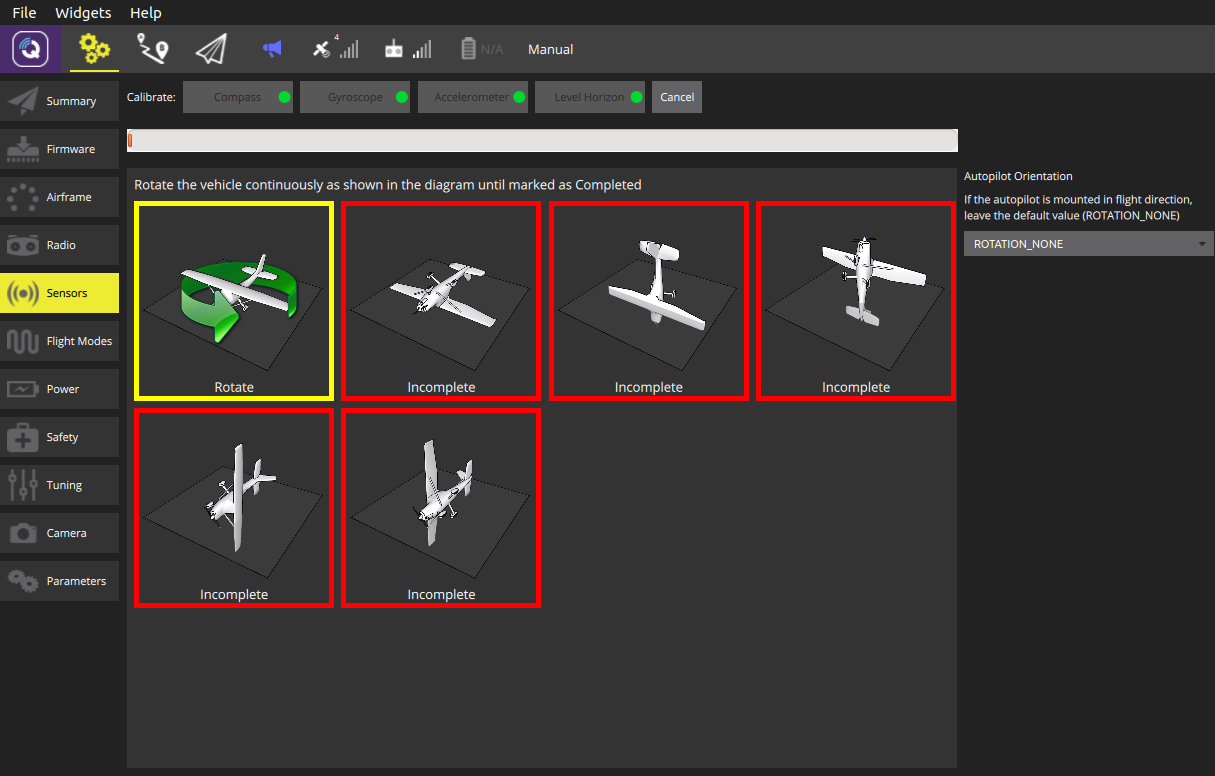
- Compass : 아래 그림처럼 쿼드콥터의 자세를 잡고 회전표시가 나오면 회전해주면 됩니다. 나머지 세 개도 각각 클릭해서 진행해주시면 되는데 각각 살짝 달라서 지침을 잘 읽고 그대로 따라 주시면 캘리브레이션이 완료됩니다.
(5) Flight Mode 설정
http://www.moses-modellbau.de/mediafiles/Anleitungen/DEVO/Manual%20of%20DEVO-7.pdf
보통 조종기에서는 조종기 위쪽 버튼을 통해서 여러가지 mode들을 선택할 수 있습니다. 예를 들면, auto takeoff, landing, return to home등의 기능들입니다. 저는 Gear button을 사용해서 ROS로 드론을 컨트롤 하는 모드와 손으로 조종하는 모드를 왔다갔다 하려고 합니다.
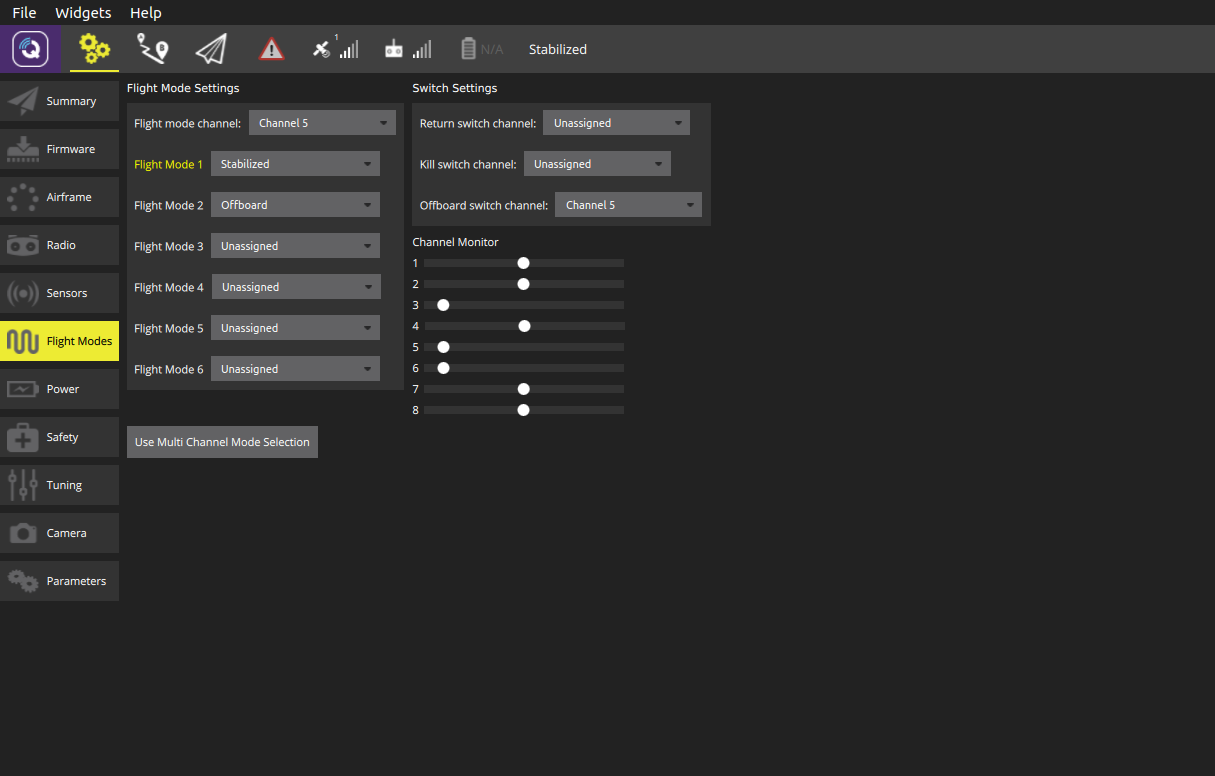
 저는 GEAR가 channel 5이고(radio test할 때 그렇게 나옵니다) 따라서 Flight mode channel에 channel 5를 사용하고 Flight Mode 1에는 Stabilized를 선택하고 Flight Mode 2에는 offboard를 선택해줍니다. 그리고 오른 쪽"Switch Settings"에서는 세 번째 offboard switch channel에서 Channel 5를 선택해주면 Gear버튼을 위로 올리고 내리는 것에 따라서 손으로 조종하다가도 off board모드로 들어가서 라즈베리 파이에 있는 명령들로 쿼드콥터를 자율주행 시킬 수 있습니다.
저는 GEAR가 channel 5이고(radio test할 때 그렇게 나옵니다) 따라서 Flight mode channel에 channel 5를 사용하고 Flight Mode 1에는 Stabilized를 선택하고 Flight Mode 2에는 offboard를 선택해줍니다. 그리고 오른 쪽"Switch Settings"에서는 세 번째 offboard switch channel에서 Channel 5를 선택해주면 Gear버튼을 위로 올리고 내리는 것에 따라서 손으로 조종하다가도 off board모드로 들어가서 라즈베리 파이에 있는 명령들로 쿼드콥터를 자율주행 시킬 수 있습니다.
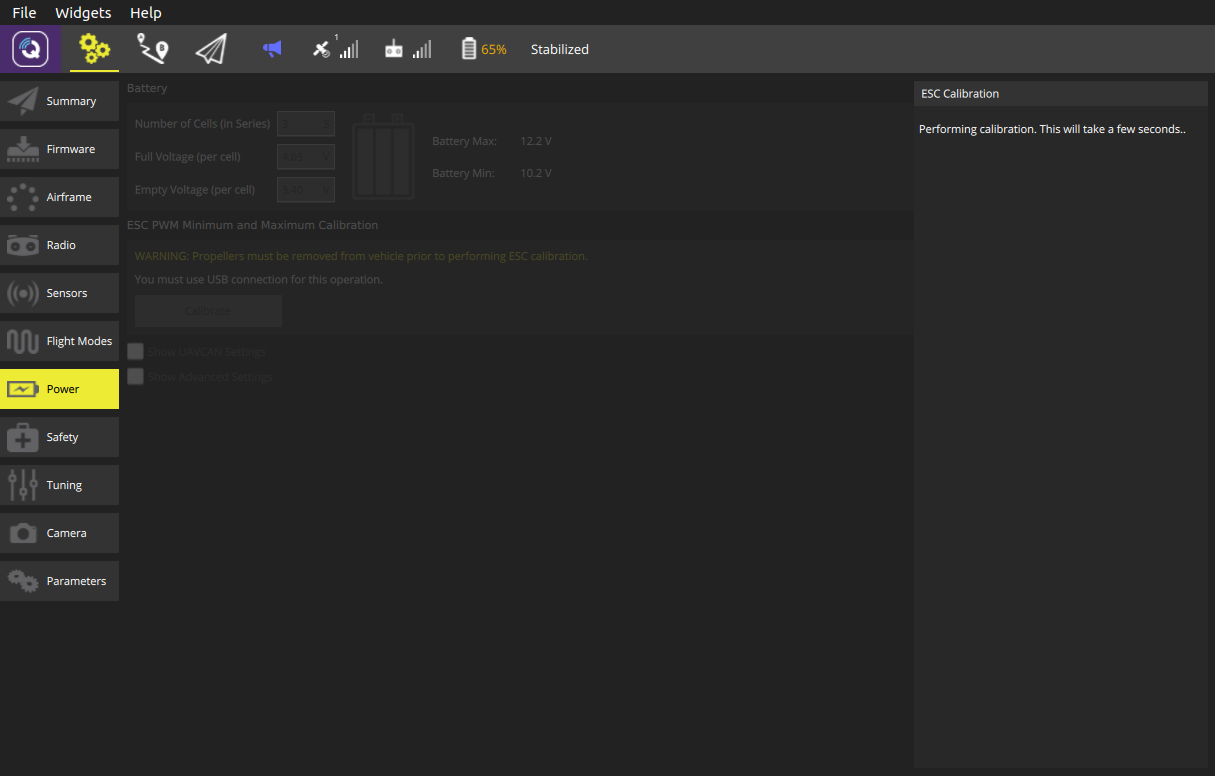
(6) ESC Calibration
Qgroundcontrol에서 ESC 칼리브레이션은 상당히 간단합니다. 왼쪽의 Power탭으로 들어가서 Calibrate를 눌러주면 battery를 연결해주라는 지침이 나옵니다. 그러면 끝입니다.
5. Arming
이제 비행을 하기 위한 준비는 다 끝났습니다. Arming이라는 단어가 있는데 안전을 위한 장치라고 보시면 될 것 같습니다. 자동차에서도 키를 꼽고 돌려야 시동이 걸리듯이 쿼드콥터에서도 어떠한 행동을 해줘야 쿼드콥터로 비행을 할 수 있습니다. 보통은 조종기에서 Throttle 스틱을 오른쪽 밑으로 해주면 Arming이 되도록 설정되어있는데 Firmware마다 다를수가 있습니다. PX4가 업로드 되어있는 Pixhawk에서는 배터리를 연결하고 컴퓨터와는 연결하지 않은 상태에서 safety switch를 몇 초간 눌러주고 그 다음에 조종기에서 throttle stick을 오른쪽 밑으로 유지하면 arming이 되면서 네 개의 모터가 돌게 됩니다. arming이 될 때 왜 모터가 도는 지 의아해하는 분들이 계실 수도 있는데 모터가 돌지 않으면 arming이 되었는지 알 수 없기 때문에 쿼드콥터가 뜨지 않을 정도만 돌게 해주는 것입니다. SITL에서도 잘 보면 arming이라는 command를 주면 쿼드콥터의 프로펠러들이 도는 것을 볼 수 있었습니다.

6. Test Flight
Pixhawk가 제대로 설정이 되었고 비행이 가능한 지 확인하기 위해서 실재로 낮은 고도로 비행시켜 보았습니다.
450 Frame으로 PID계수가 맞춰져있어서 Tunning안해줘도 잘 날지만 날려본 다음에 진동을 보고서 P나 I gain을 바꿔주는 것이 좋습니다. 저는 Stabilized 모드로 비행을 했습니다. 다음 사진과 같이 쿼드콥터를 세팅해놨습니다.
https://www.facebook.com/100004068281468/videos/917401101738824/
비행 동영상 링크는 위와 같습니다.