Off-board Control (2) Raspberry Pi
1. Off-board Control
쿼드콥터를 자율주행하기 위해서 Pixhawk와 Raspberry Pi를 이용할 것 입니다.Pixhawk에는 PX4 flight stack이, Raspberry Pi에는 ROS가 설치됩니다. 두 Module이 Mavlink라는 통신 프로토콜을 통해 서로 통신하면서 픽스호크는 제어를 하게 되고 라즈베리파이는 offboard control을 하게 됩니다.
따라서 전 글에서는 Pixhawk보드를 설정하고 쿼드콥터를 날리기 위한 준비를 했었습니다. 이제는 Offboard control을 위해서 Raspberry Pi를 설정해줘야합니다. 해야할 일은 다음과 같습니다.
- 라즈베리파이에 Ubuntu 16.04 Mate설치
- 라즈베리파이에 ROS kinetic설치
위 과정을 수행하기 전에 라즈베리 파이가 무엇인지, 그리고 라즈베리 파이를 사용하기 위한 기본적인 세팅을 살펴보겠습니다.
2. Raspberry Pi
https://namu.wiki/w/%EB%9D%BC%EC%A6%88%EB%B2%A0%EB%A6%AC%20%ED%8C%8C%EC%9D%B4(%EC%BB%B4%ED%93%A8%ED%84%B0)
 라즈베리파이란 영국 라즈베리 파이 재단에서 만든 초저가/초소형 PC입니다. 교육용 프로젝트의 일환으로 개발되었습니다. 아두이노와 함께 교육용 플랫폼의 대표 주자입니다. 아두이노와는 달리 정말 컴퓨터처럼 사용될 수 있습니다. 그렇게 컴퓨터처럼 사용되려면 몇 가지가 필요합니다.
라즈베리파이란 영국 라즈베리 파이 재단에서 만든 초저가/초소형 PC입니다. 교육용 프로젝트의 일환으로 개발되었습니다. 아두이노와 함께 교육용 플랫폼의 대표 주자입니다. 아두이노와는 달리 정말 컴퓨터처럼 사용될 수 있습니다. 그렇게 컴퓨터처럼 사용되려면 몇 가지가 필요합니다.
모니터, 키보드, 마우스, 전원선, HDMI케이블, SD card
필요한 것들을 다 연결한 상태는 다음과 같습니다. 이제 라즈베리 파이에 올라갈 OS를 설치해보도록 하겠습니다.

3. 라즈베리파이에 Ubuntu 16.04 MATE 설치
https://ubuntu-mate.org/raspberry-pi/
Ubuntu 중에서도 라즈베리파이에 설치할 OS는 Ubuntu-MATE입니다(설치하고 나서 정식 우분투가 라즈베리파이3를 지원한다는 것을 알았습니다 문제 생기면 그 때 다시 설치하려 합니다)
데스크탑에 우분투를 설치할 때와 마찬가지로 이미지파일을 받아서 압축을 풀고 이번에는 라즈베리파이의 SD card에 이미지파일을 구워주고 그 SD card를 라즈베리파이가 꽂아주면 됩니다. 원래는 라즈베리파이 1에 라즈비안이라는 OS를 사용하고 있었는데 Mavros가 설치되지 않는 문제가 있어서 라즈베리파이 3를 구매하고 우분투를 설치하기로 했습니다.(우분투는 라즈베리파이 2부터 지원이 됩니다)
우분투 메이트 다운로드는 위 홈페이지에서 하시면 됩니다. 이미지 파일을 구워주는 것은 Win32 disc manager를 사용하였습니다.
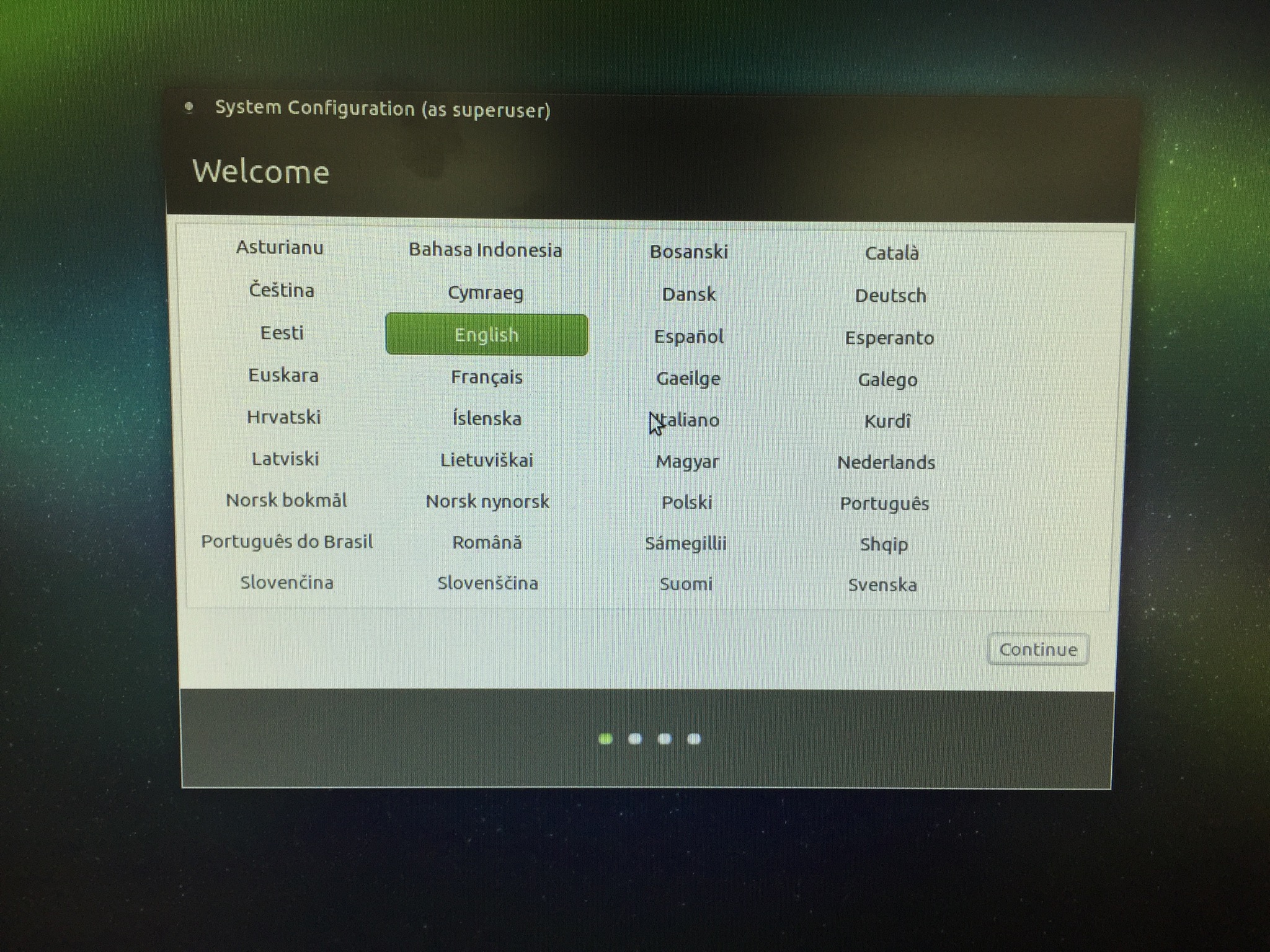
SD 카드를 라즈베리파이에 꽂으면 다음과 같은 화면이 나옵니다.

데스크탑에 설치할 때와 마찬가지로 언어(영어)를 선택해주고 살고 있는 도시인 Seoul를 입력해주면 설치가 시작됩니다.
 MATE에서는 따로 파티션을 지정해주는 단계가 없습니다. 이렇게 Raspberry Pi 3에 Ubuntu 16.04 MATE를 설치 완료했습니다. 대신에 resize를 해줘야합니다. 처음 MATE가 실행되고 켜지는 창에서 저 빨간색을 선택하면 resize를 할 수 있는 항목이 있습니다.
https://www.raspberrypi.org/magpi/ubuntu-mate-review/
MATE에서는 따로 파티션을 지정해주는 단계가 없습니다. 이렇게 Raspberry Pi 3에 Ubuntu 16.04 MATE를 설치 완료했습니다. 대신에 resize를 해줘야합니다. 처음 MATE가 실행되고 켜지는 창에서 저 빨간색을 선택하면 resize를 할 수 있는 항목이 있습니다.
https://www.raspberrypi.org/magpi/ubuntu-mate-review/
4. 라즈베리파이에 ROS Kinetic 설치
ROS설치에 대해서는 ROS wiki를 참조해주시는 것이 가장 좋습니다. 링크는 다음과 같습니다.
http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Kinetic%20on%20the%20Raspberry%20Pi
Wifi를 연결하고 위 링크에 있는 명령어들을 순서대로 실행해주면 됩니다. 명령어들만 나열해 보겠습니다.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop
sudo rosdep init
rosdep update
sudo apt-get install python-rosinstall
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
source /opt/ros/kinetic/setup.bash
source /home/leewoongwon/ros_catkin_ws/devel/setup/bash
mkdir -p ~/ros_catkin_ws/src
cd ~/ros_catkin_ws/src
catkin_init_workspace
위와 같이 ROS Kinetic 완료한 후에 데스크탑에서 설치했던 때와 같이 ROSCORE를 구동시켜봅니다.
ROSCORE가 문제없이 잘 실행되면 거북이 예제를 실행해봅니다.
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
다른 창에서 키 노드를 활성화시켜서 키보드로 거북이를 움직여봅니다. 이로서 ROS Kinetic이 설치 완료 되었습니다.
여기까지 라즈베리파이에 Ubuntu와 ROS 설치하는 것을 살펴 보았습니다.